

注释
|
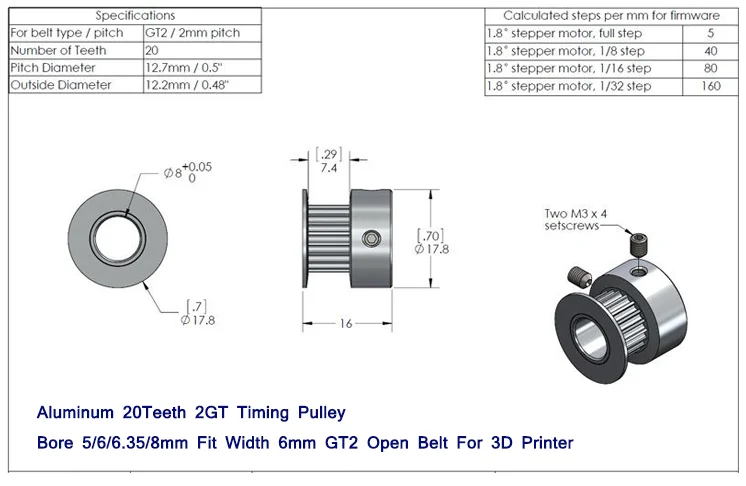
什么样的皮带和皮带轮?皮带轮齿数、皮带齿距等。您使用的是什么微步进? 通常,在皮带驱动的机器上,您需要最小直径的皮带轮,并且您还希望微步进足够高以获得每毫米的大量步进脉冲。 |
|
你每毫米有5步? |
|
哦,感谢上帝! 我明天会继续努力,让你们更新! |
|
这就是我所做的。 所以我把它设置回 5steps/mm,然后机器开始像地狱一样缓慢地移动! |
|
所以改变你的进给速度和最大轴速度
|
你如何“移动它 200 步”? |
|
我将机器移动了 1 毫米(意味着 200 步),它实际上移动了 40 毫米。 所以我将 grbl 设置为 5steps/mm。 现在我正在查看它,GRBL 设置以步数和毫米为单位,这意味着如果您从 200 步/毫米到 5 步/毫米并且您仍然想以相同的速度前进,您需要给出最大速率一个 40 倍的乘数。 如果一切都按我认为的步骤进行,那会简单得多。步数/毫米、步数/分钟和步数/秒2 ..因为现在如果您更改设置,您需要取出计算器并再次计算所有内容.. 我会检查这个并告诉你发生了什么。 |
|
问题解决了。 是我,我认为设置 grbl 只需要更改步数/毫米,但是一旦你触摸这些,你的所有设置都会被破坏,尤其是从 200 到 5 时。 |
|
你做了什么你的设置最终看起来如何。我也有同样的问题 |
|
有些电线杆没有正确接线,我只需要焊接它们。
|
|
@fatmisami……..我正在使用 Arduino Uno + CNC Shield v3、2 个 nema 17 电机和 2 个 A4988 驱动器。我的 X 轴连接有 M8 x 1.25 节距杆和 y 轴,带有 GT2 正时皮带轮和 2 毫米节距皮带。我试过第 8 和第 16 微步。但我无法以相同的进给速率同步 X 和 Y 轴。带皮带的 y 轴与您的移动非常慢的问题相同。请帮我解决一下这个。 |
|
您必须首先校准每个轴的步数/毫米。然后速度将是相同的。
|
|
我已经一年多没有用那台数控机床做过任何事情了。 |
我也有同样的问题..只需从 Arduino 上取下屏蔽并将微步进销焊接到 1/16,然后将每毫米的旧步数乘以 16。它应该可以工作。有时使用跳线连接微步进引脚不起作用。 |
|
你做了什么你是怎么设置的。我也有同样的问题 |
.png&h=110&w=185&q=90&zc=1&ct=1)
.jpg&h=110&w=185&q=90&zc=1&ct=1)
.png&h=110&w=185&q=90&zc=1&ct=1)
.png&h=110&w=185&q=90&zc=1&ct=1)
{kind=link}
{kind=link}
{kind=link}
法特米萨米 评论 on 30 Dec 2018
我自己做了一台数控机床。
电子产品:Arduino Uno + CNC Shield v3 + 4 A4988 移动 4 NEMA17。
NEMA 17 正在用皮带和滑轮移动我的轴。测量时,每毫米为 5 步。
使用 $100=250 ,我的电机工作正常。但是一旦将其设置为 $100=5,机器就会变得非常慢!电机在振动,一切都很奇怪。
有什么线索吗?